Project description
The present work addresses the development of a hierarchic family of shell models and accompanying discretization schemes with NURBS (Non-Uniform Rational B-Splines) functions that are suitable for the analysis of both thick and thin shell structures.
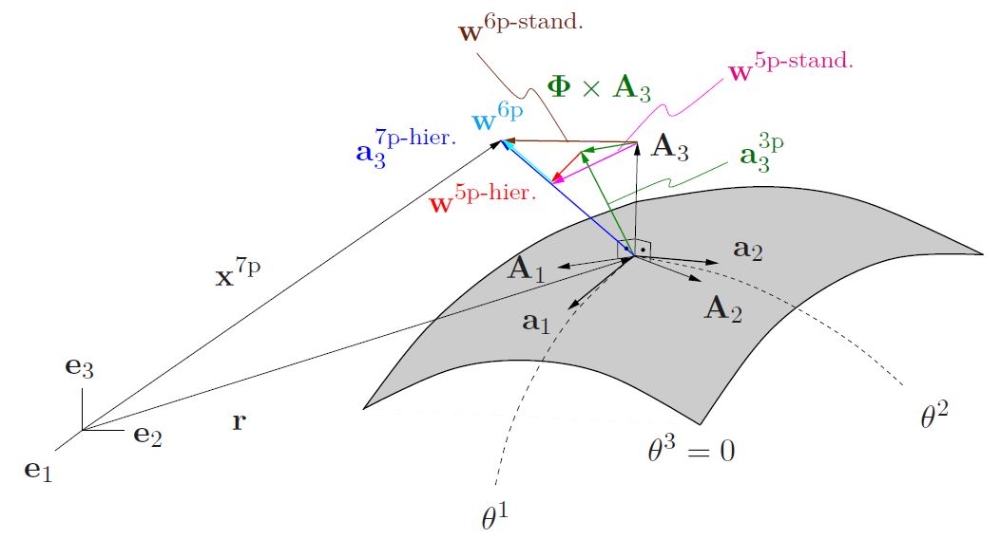
The hierarchy in the shell mechanics is based on a minimalistic 3-parameter formulation, which mechanically corresponds to the shear-rigid Kirchhoff-Love shell model. It is particularly suitable for modeling thin structures with predominantly membrane and bending action. Transverse shear effects and extensibility of the shell in thickness direction are not accounted for. The assumed linear kinematics of the thin shell can be described with three independent parameters, which correspond to the mid-surface displacement components of a material point. No rotations are defined as additional degrees of freedom such that the formulation is rotation-free.
Linear-elastic and isotropic material properties are assumed. For asymptotic correctness of the model the constitutive law is modified by implementing the stress condition σ33=0 to eliminate ε33 via static condensation. Additionally, Love's first approximation, neglecting contributions with regard to curvature in thickness direction of the shell is not considered. Consequently, membrane and bending action are coupled due to nonzero off-diagonal blocks in the constitutive matrix. No pre-integration of the material law is performed. The static and kinematic variables of the shell equations are therefore stresses and strains.
With increasing thickness of the structure, transverse shear effects become more pronounced, thus significantly contributing to the total strain energy of the system. For the Reissner-Mindlin shell model developed in this work, the Kirchhoff-Love assumption is relaxed by introducing additional parameters, which do not depend on the gradient of the mid-surface displacement field and thus allow for extra transverse shear effects. These parameters are introduced via a hierarchic difference vector. The inextensibility of the director in the deformed configuration reduces the number of additionally required parameters to two. In the geometrically linear case, the inextensibility constraint is constructed by expressing the components of difference vector with respect to the in-plane base vectors of the reference shell mid-surface.
In order to account for changes in thickness direction additionally, a 7-parameter shell formulation is derived, which represents an extension of the Reissner-Mindlin-type model with five parameters. The 7-parameter shell model incorporates extensibility of the director in thickness direction and enables the application of three-dimensional constitutive laws without the need of modifications.
The main innovation of this thesis is based on the hierarchic parametrization of the family of 3-, 5- and 7-parameter shell formulations, which results in significant benefits both with regard to model-adaptivity and finite element technology. The common approach in FEA consists of adding a difference vector on the director of the undeformed configuration. As a result, continuity requirements on the applied function spaces are reduced. It represents the first Reissner-Mindlin-type shell formulation to be used in this work. Equal-order interpolation of both the mid-surface displacement field and the difference vector, however, results in transverse shear locking which is verified in several numerical plate bending experiments. Alternatively, a hierarchic parametrization is derived for the Reissner-Mindlin model that imposes a shear vector on the rotated director of the 3-parameter Kirchhoff-Love formulation. The procedure of adding the extra parameters is defined so that the kinematic equations of the basic Kirchhoff-Love model are gradually enhanced to obtain the shear flexible 5-parameter model, without the need of a complete new description of the shell kinematics.
Although exactly representing the same shell model, with regard to finite element discretization, the hierarchic parametrization of the current director avoids transverse shear locking already in a pure displacement formulation. The ansatz to split the total deformation of the Reissner-Mindlin shell model into independent components related to bending and shear is frequently used in classical theories on beams, plates and shells for more than fifty years. The hierarchic parametrization in principal follows Başar and Krätzig (1985) and was used in a similar way for shear-deformable subdivision-based shell finite elements in Long et al. (2012). In Başar and Krätzig (1985) the authors applied the decomposition of the rotation of the shell director into the contribution of the deformed shell normal (Kirchhoff-Love) and rotations related to shear. This allows to derive Kirchhoff-Love theories from shear deformation formulations by simply removing the transverse shear contribution. For FEA, this approach, moreover, offers the significant advantage of an independent parametrization of the transverse shear and consequently avoids incompatibilities of the discrete function spaces in the corresponding kinematic equations. For a decreasing shell thickness the solution asymptotically converges to the Kirchhoff-Love solution, whereas removal of the shear vector directly recovers the 3-parameter Kirchhoff-Love model.
The hierarchic 7-parameter shell formulation represents an extension of the hierarchic 5-parameter Reissner-Mindlin shell model. In order to account for extensibility of the director and linear transverse normal strains, the kinematics of the Reissner-Mindlin formulation is enriched with a 6th and 7th displacement parameter, which ultimately yields linear and quadratic displacement contributions across the thickness. By switching off the linear and quadratic displacement contributions in thickness direction, the kinematics of the hierarchic 5-parameter Reissner-Mindlin model can be obtained, whereas further elimination of the difference vector yields the kinematic equations of the 3-parameter Kirchhoff-Love shell. This consequently allows for a straightforward combination of these three element types within one mesh and thus serves as an ideal basis for a model adaptive approach. Numerical experiments in this thesis demonstrate that besides transverse shear locking also curvature thickness locking is by default avoided in pure displacement-based 7-parameter shell finite elements due to the concept of a hierarchic parametrization. The non-hierarchic 7-parameter shell elements with pure displacement formulation and difference vector to be imposed on the director of the undeformed configuration are sensitive to both transverse shear and curvature thickness locking on the contrary.
The continuity requirements on the displacement functions for the proposed hierarchic 5- and 7-parameter shell models are identical to those of the 3-parameter Kirchhoff-Love formulation, i.e. C1.The demand for shape functions with square integrable partial derivatives of order two, however, can be naturally satisfied with the higher-continuity NURBS discretizations used in this work. NURBS which represent the standard functions of computer-aided engineering design are applied as shape functions in an isoparametric finite element concept following the isogeometric method of Hughes and coworkers (Hughes et al. (2005), Cottrell et al. (2009)). Their higher continuity property additionally enables a pointwise exact definition of the shell director in the entire patch domain.
The effect of higher-order and higher-continuity NURBS discretizations on the accuracy of the discrete solution functions is investigated and analyzed in several numerical experiments. Computational results of higher-continuity NURBS are provided to demonstrate the superior accuracy compared to C0-continuous discretizations. Additionally, analysis of the most prominent locking effects that may show up for the displacement-based isogeometric shell finite elements reveals that the in-plane part of all shell elements developed in this thesis is, in general, considerably prone to locking. Therefore, two new strategies to remove geometric locking effects from higher-order and higher-continuity NURBS discretizations were developed and applied to the membrane part of the shell elements to cure locking: First, the DSG approach of Bletzinger et al. (2000) was successfully transferred to higher-order and higher-continuity NURBS discretizations in order to remove membrane and in-plane shear locking. Second, a mixed displacement-stress formulation which is based on a two-field Hellinger-Reissner variational principle with independent displacement and stress fields is applied to the in-plane strain components of the shell elements. The modified isogeometric Kirchhoff-Love and hierarchic 5- and 7-parameter shell formulations are completely free from geometric locking. Higher-continuity NURBS shape functions to be used for the discretization of the displacement fields in general result in continuous strain and stress distributions which in the case of the NURBS-DSG method may result in a coupling of degrees of freedom that compromises computational efficiency.
In several benchmark problems the performance of the newly developed hierarchic shell elements is proven. For the displacement-based element formulations the numerical results conform well with the results from literature like for example from Kiendl et al. (2009). Modification of the membrane part with the mixed displacement-stress ansatz successfully removes locking and leads to significantly faster convergence of the investigated results to the reference solutions. For multipatch analysis, the penalty-type bending strip method of Kiendl et al. (2010) is used to connect NURBS surface patches with slope continuity in a weak sense. Appropriate stiffness parameters for the bending strips are defined according to Kiendl (2011).
The isogeometric analysis of highly-curved respectively thick shell structures reveals significant differences in the system response for the three different shell models (3-, 5- and 7-parameter). Simultaneously, a fast diminution of the influence of both transverse shear and higher-order mechanical effects on the investigated displacement results can be observed. For model adaptivity, analysis of the same problem setup is performed with hierarchic 5-parameter Reissner-Mindlin shell elements by systematically deactivating those degrees of freedom related to the shear vector. The computational results obtained, perfectly match the 3-parameter Kirchhoff-Love solution.
Project data
Project titel:
Isogeometric analysis of shells
Research:
Ralph Echter