Überblick
- Kontaktformulierung auf Basis der schwachen Kollokation 2D und 3D
- Vergleich von kollokativen und integralen Kontaktformulierungen
- Dynamische Kontaktvorgänge: modifizierte Diskretisierung in Raum und Zeit
{kind=link}
Projektbeschreibung
Die wissenschaftliche Auseinandersetzung mit Kontaktvorgängen in der Mechanik begann mit Heinrich Hertz im Jahre 1882. Seine analytischen Studien sind grundlegend für unser heutiges Verständnis der Kontaktmechanik. Da analytische Lösungen nur für sehr einfache Problemstellungen existieren, werden gegenwärtig vorrangig numerische Verfahren zur Lösung strukturmechanischer Kontaktprobleme, beispielsweise bei Crash-Simulationen, eingesetzt. Im Mittelpunkt steht dabei die Finite-Elemente-Methode, die das Strukturproblem in einer schwachen integralen Weise löst. Hierzu wird die zu berechnende Struktur, bzw. das Bauteil, in einem CAD-Programm entworfen und anschließend für die Berechnung in finite Abschnitte unterteilt. In diesem Vernetzungsschritt findet eine Approximation der wahren Geometrie durch einfache, oft nur lineare, Polygonzüge statt. Die Oberfläche des Bauteils ist dadurch facettiert beschrieben, was die Formulierung von Kontaktbedingungen zwischen den Körpern erschwert. Es kann zu künstlichen Verhakungen und Verkantungen der Körper kommen, was wiederum zu unphysikalischen Ergebnissen oder numerischen Instabilitäten führen kann, siehe Beispiel Ironing Problem (Video rechts, oben). Mit der isogeometrischen Analyse kann dieses Problem umgangen werden (Video rechts, unten), indem der Funktionenraum der CAD-Geometrie für die Finite-Elemente-Berechnung verwendet wird. Die glatte Oberfläche bleibt bei der Vernetzung erhalten, allerdings sind nun die einfachen Polynome durch nicht-uniforme, gebrochenrationale B-Splines, kurz NURBS ("non-uniform rational B-splines"), ersetzt worden. Ein neues, hoch spannendes Forschungsfeld ist eröffnet, das Raum für innovative Ideen bietet.
Das Ziel dieses Projekts ist deshalb die Entwicklung eines stabilen und leistungsfähigen isogeometrischen Kontaktalgorithmus. Da neben der Berechnung statischer Probleme dynamische Probleme betrachtet werden, wird eine modifizierte Diskretisierung in Raum und Zeit diskutiert.
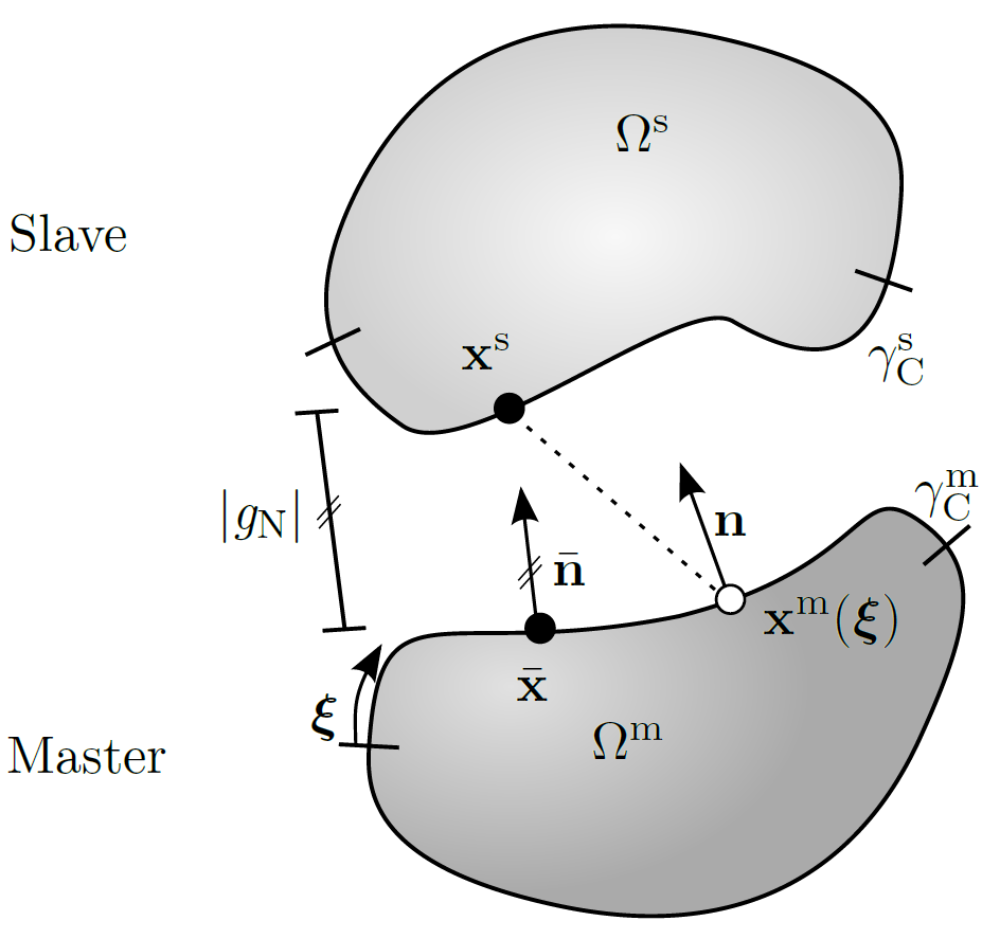
Um Körper am gegenseitigen Durchdringen zu hindern, müssen sogenannte Nichtdurchdringungsbedingungen formuliert werden. Der minimale Abstand zwischen zwei Körpern zeigt an, ob Regionen durchdrungen sind oder nicht. Im klassischen Ein-Schritt-Algorithmus werden dazu die zwei am Kontakt beteiligten Körper in einen "Slave"- und einen "Master"-Körper eingeteilt. Der Abstand wird vom Slave-Körper aus auf den Master-Körper, meist unter Verwendung der Master-Oberflächennormalen, gemessen.
Wird der Abstand negativ, werden Kontaktspannungen aktiviert, die die durchdrungenen Regionen auseinander schieben. Weisen die Oberflächen eine gewisse Rauigkeit auf, entstehen bei einer tangentialen Relativbewegung tangentiale Spannungen, die unter Verwendung des Coulomb'schen Reibgesetzes durch die Gleitspannung begrenzt sind. Für den normalen wie tangentialen Kontakt lassen sich die Zwangsbedingungen in Form der Kuhn-Tucker-Karush-Bedingungen zusammenfassen. Die starken Zwangsbedingungen werden im nächsten Schritt in eine schwache, integrale Form überführt, um als Nebenbedingungen in den Finite-Elemente-Ansatz einzugehen. Normal zur Oberfläche wird dazu die Lagrange-Multiplikator-Methode verwendet mit der, unter Einführung neuer Unbekannten, eine exakte Erfüllung der Nichtdurchdringungsbedingung möglich ist. Für den tangentialen Kontakt wird die Penalty-Methode zur Einhaltung der Haft-und Gleitbedingungen genutzt, welche die Verletzung der Zwangsbedingung mit einer Strafsteifigkeit versieht. Die hochgradig nichtlinearen Gleichungen werden konsistent linearisiert, um ein quadratisches Konvergenzverhalten zu generieren.
Die so erhaltene linearisierte virtuelle Kontaktarbeit muss nun von der kontinuierlichen in eine diskrete Form überführt werden. Dies geschieht in zwei Abschnitten: Zuerst wird der Integrand durch Einsetzen der Oberflächen-Diskretisierung und des diskretisierten Lagrange-Multiplikators diskretisiert. Im zweiten Schritt wird das Integral selbst mittels einer Summe über Auswertungspunkte angenährt. Dieser unscheinbare zweite Schritt ist das Herzstück des entwickelten Kontaktalgorithmus. Je nach Anzahl und Lage der Auswertungspunkte werden die Kontaktbedingungen punktuell oder integral erfüllt. Der Integrand verbleibt in beiden Fällen unverändert, sodass die Behandlung beider Zustände in einem Kontaktelement möglich wird.
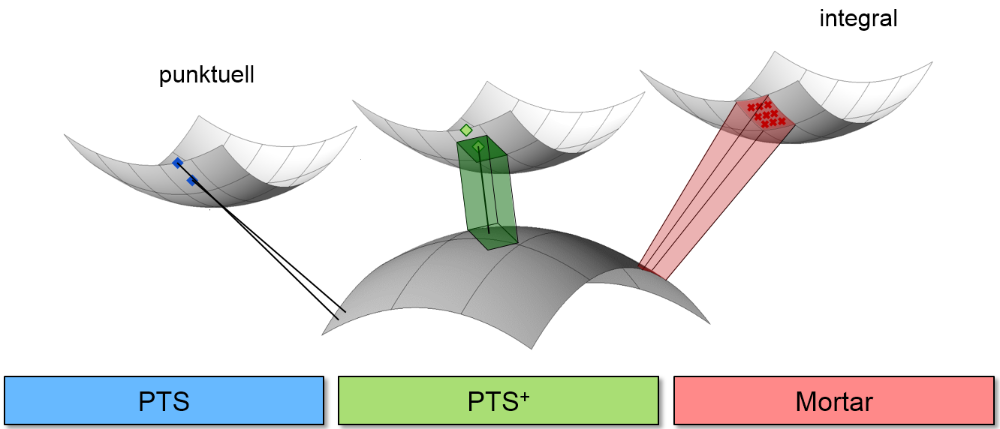
Entspricht die Anzahl an Auswertungspunkten der Anzahl an Kontrollpunkten der Oberfläche, gehört das Verfahren zur Gruppe der kollokierenden, punktuellen "Node-To-Segment"-Methoden (in Abbildung oben blau dargestellt). Da die Kontrollpunkte isogeometrischer Objekte nicht zwangsläufig auf der Geometrie selbst liegen, werden zur Auswertung der Kontaktbedingung spezielle Kollokationspunkte auf der Oberfläche des Objektes gewählt, beispielsweise Greville-, Botella- und Chebyshev-Punkte. In diesem Zusammenhang wird der Name "Point-To-Segment"-Methode, kurz PTS, für die erste Variante des entworfenen Kontaktelements vorgeschlagen. Die Nichtdurchdringungsbedingung wird an den Kollokationspunkten punktweise exakt erfüllt. Die Kontaktkräfte entstehen als Reaktionskräfte.
Werden den Kollokationspunkten Kollokationsgewichte zugeordnet, ist der Übertrag von Kontaktspannungen statt -kräften in der Kontaktzone möglich. Die Kollokationsgewichte werden zu Beginn der Berechnung einmalig bestimmt und bleiben während des gesamten Simulationszeitraums konstant. Die positive Auswirkung einer Gewichtung zeigt sich vor allem bei reibbehaftetem Kontakt in der Auswertung des Reibgesetzes. Die gewichtete Kollokation, als zweite Variante des Kontaktelements, erhält den Namen PTS+ (in Abbildung oben grün dargestellt).
Mit der Verwendung von Gauß-Auswertungspunkten wird eine integrale Methode initiiert, welche die Kontaktbedingungen numerisch integriert. Wird zur Positionierung der Gauß-Punkte die Slave- und Master-Oberflächendiskretisierung einbezogen, wird von einer konsistenten Segmentierung gesprochen, die für gekrümmte Strukturen äußert komplex ist. Aufgrund der glatten Oberflächenbeschreibung mit NURBS sind die Integrationsfehler, die durch eine fehlende Segmentierung entstehen so gering, dass auf letztere verzichtet werden kann. Die Gauß-Punkte werden deshalb je Slave-Element auf der Slave-Oberfläche angeordnet. Die Kontaktbedingungen werden in dieser dritten Kontaktelement-Variante integral erfüllt. Da in der entwickelten Variante alle Größen auf die Kontrollpunkte der Slave-Oberfläche projiziert werden, kann von einer "Mortar"-Methode (in Abbildung oben rot dargestellt) statt einer "Segment-To-Segment"-Methode (STS) gesprochen werden.
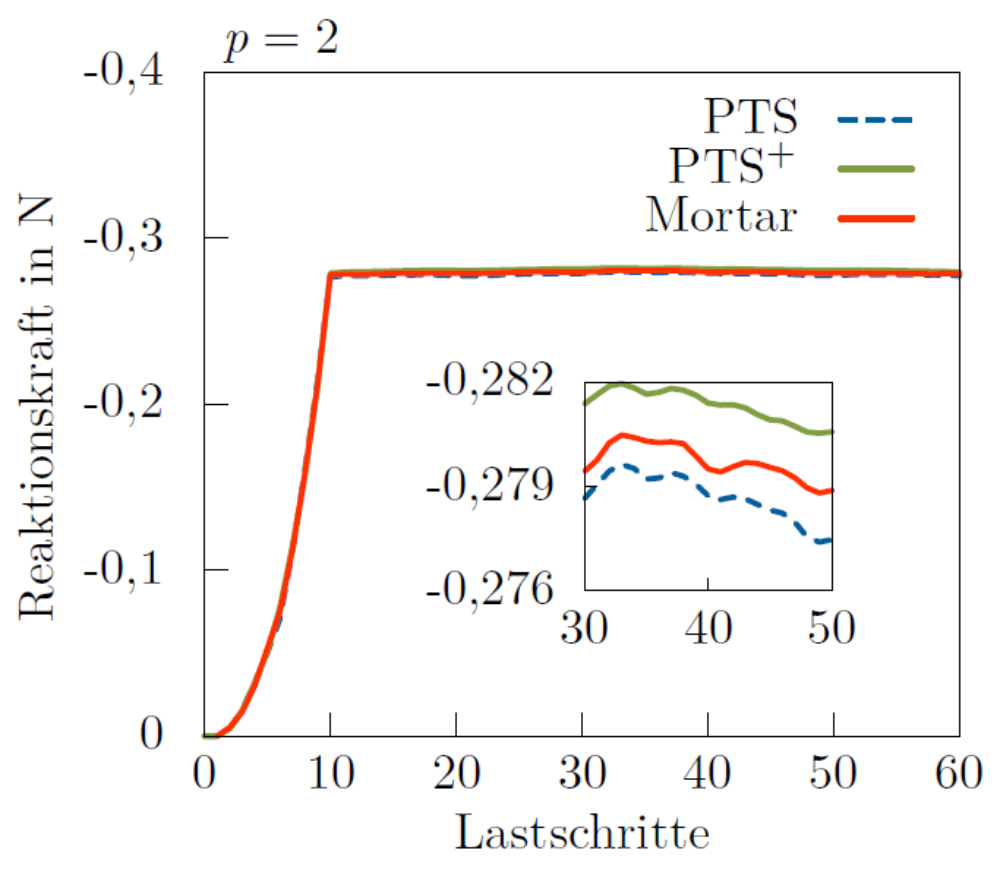
Eine Gegenüberstellung der Ergebnisse der drei Kontaktelement-Varianten PTS, PTS+ und Mortar in numerischen Tests, zeichnet in puncto Rechenzeit die Kollokationsmethoden als klare Sieger aus. Da die Rechenzeit linear von der Anzahl an Auswertungspunkten abhängt, benötigen weniger Auswertungspunkte weniger Zeit. Weniger Auswertungspunkte führen aber meist zu einer geringeren Ergebnisqualität. Jedoch kann gezeigt werden, dass weder im Spannungsresultat des Hertz’schen Kontaktes noch bei den Reaktionskräften des "`Ironing"' Problems markante Unterschiede zwischen der einfachen Kollokation und teureren Integration festgestellt werden können. Daraus folgend stellt sich, unter Einbezug der Resultate mit Reibung, die gewichtete Kollokation PTS+ als effizienteste Kontaktelement-Variante heraus.

Werden dynamische Kontaktprobleme untersucht, wird eine stabile Zeitintegration benötigt, die neben der Diskretisierung im Raum eine Diskretisierung in der Zeit einführt. Der betrachtete Zeitraum wird dazu in Zeitintervalle unterteilt. Unter Verwendung eines Ein-Schritt-Algorithmus werden alle Feldgrößen diskret am Intervallende aus Informationen des letzten bzw. des aktuellen Zeitschritts berechnet. Werden keine Informationen des aktuellen Zeitpunktes benötigt, wird von einer expliziten Methode gesprochen. Die Bewegungsgleichung wird zum letzten bekannten Zeitpunkt ausgewertet. Die Werte zum Folgezeitpunkt können ohne Gleichungslösen daraus bestimmt werden. Das Verfahren ist allerdings nur bedingt stabil.
Deshalb wird im Rahmen dieses Projekts ein implizites Verfahren verwendet, welches Informationen des aktuellen Zeitpunktes mit einbezieht. Als Basis-Zeitintegrationsverfahren wird das Newmark-Verfahren verwendet, das durch Aufteilung der Beschleunigung in einen kontaktabhängigen und kontaktunabhängigen Anteil modifiziert wird. Die kontaktabhängigen Anteile werden dissipativ verändert, sodass nur Beschleunigungen des letzten Zeitschritts berücksichtigt werden. Die Energie des Systems wird so stabilisiert. Allerdings treten Oszillationen in den Kontaktkräften auf, deren Ursache im Unverhältnis zwischen Beschleunigung und Masse der Kontakt-Kontrollpunkte liegt. Aufgrund des Kontaktvorgangs werden die Kontrollpunkte der Oberfläche schlagartig auf null abgebremst, singuläre Beschleunigungen entstehen. Da die Kontrollpunkte massebehaftet sind, entstehen singuläre Trägheitskräfte, die zu oszillierenden Kontaktkräften führen. Wird die Masse in der Kontaktzone entfernt, kann diesem Phänomen entgegen gewirkt werden. Physikalisch betrachtet ist das Umverteilen von Oberflächenmasse legitim, da Oberflächen unendlich dünn sind und somit keine Masse besitzen. Formal wird die Oberflächenmasse durch Umverteilen der Formfunktionsanteile senkrecht zur Kontaktoberfläche auf tiefer liegende Kontrollpunktreihen entfernt. Die Kontrollpunkte der Kontaktoberfläche werden masselos und Oszillationen in den Kontaktkräften verschwinden. Zwei mögliche Verteilungsszenarien werden untersucht. Die erste Methode verteilt den Formfunktionsanteil auf tiefer liegende Kontrollpunkte des Randelements gleichmäßig, die zweite mit speziellen Faktoren, die eine Ordnungsreduktion im Randelement zur Folge haben. Beide Methoden erweisen sich als zielführend und ergeben, kombiniert mit dem dissipativen Newmark-Algorithmus, ein stabiles Zeitintegrationsverfahren für dynamische Problemstellungen.
Projektdaten
Projekttitel:
NURBS-FEM für Kontaktprobleme
Förderung:
Deutsche Forschungsgemeinschaft (DFG), Sachbeihilfe BI 722/8-1, GEPRIS-Projektnummer 212273885
Bearbeitung:
Martina Matzen
Veröffentlichungen
- Matzen, M. E., & Bischoff, M. (2017). A weighted point-based formulation for isogeometric contact. Computer Methods in Applied Mechanics and Engineering, 308, 73–95. https://doi.org/10.1016/j.cma.2016.04.010
- Tkachuk, A., Matzen, M. E., Kolman, R., & Bischoff, M. (2017). Singular mass matrices for isogeometric finite element analysis of dynamic contact. Proceedings of the 7th GACM Colloquium on Computational Mechanics for Young Sci-Entists from Academia and Industry, M. Von Scheven, M.-A. Keip and N. Karajan (Eds.), Stuttgart, Germany, October 11-13. https://doi.org/10.18419/opus-9334
- Matzen, M. E. (2015). Isogeometrische Modellierung und Diskretisierung von Kontaktproblemen [Doktorarbeit, Bericht Nr. 64, Institut für Baustatik und Baudynamik, Universität Stuttgart]. https://doi.org/10.18419/opus-642
- Matzen, M. E., Cichosz, T., & Bischoff, M. (2013). A Point to Segment Contact Formulation for Isogeometric, NURBS Based Finite Elements. Computer Methods in Applied Mechanics and Engineering, 255, 27–39. https://doi.org/10.1016/j.cma.2012.11.011
- Matzen, M. E., Cichosz, T., & Bischoff, M. (2012). Point to Segment Contact Formulation for isogeometric NURBS FEM. Proc. YIC 2012, First ECCOMAS Young Investigators Conference, A. Andrade-Campos, N. Lopes, R.A.F. Valente and H. Varum (Eds.), 24–27 April 2012, Aveiro, Portugal.